აქსელომეტრები და გიროსკოპები უყენია დამიზნების სისტემაში, რომლებიც გამოთვლიან რაკეტის ამჟამინდელ კოორდინატებს გარე სამყაროსთან კავშირის გარეშე ავტონომიურად. ამას ეწოდება
ინერციული ნავიგაციის სისტემა. ანუ არანაირი "ინტერნეტი" (

) არ სჭირდება რაკეტას. ინერციულმა ნავიგაციურმა სისტემამ შესაძლოა დააგროვოს გარკვეული % შეცდომები და რაკეტა კურსიდან გადაიხაროს, მსგავს შემთხვევაში შესაძლებელია GPS ნავიგაციის გამოყენებით რაკეტის კურსის კორექცია თანამგზავრის სიგნალით. თუმცა ბალისტიკური რაკეტის შემთხვევაში GPS ნავიგაცია ნაკლებად გამოიყენება.
წინასწარ სპეციალური მოწყობილობით ხდება რაკეტის დაპროგრამება.
ზოგადად ზემოთ რაც დავწერე არის საბაზისო დამიზნების პრინციპი ყველა მსგავსი რაკეტისთვის.
შემდეგ თამაშში უკვე შემოდის განვითარებული ქვეყნები კარგი ტექნოლოგიებით და ირანის დონის ქვეყნები.
მაგალითისთვის ავიღოთ რუსეთი და უკრაინა.
ამ ორი ქვეყნის ბალისტიკური რაკეტები თავისი დონით ბევრად უფრო მაღლა არიან ვიდრე ირანის რაკეტები.
უკრაინელები ამ ეტაპზე მუშაობენ "Cапсан" ტიპის ბალისტიკურ რაკეტაზე რომელიც ინერციული ნავიგაციური სისტემის გარდა მოიცავს 3 ტიპის თვითდამიზნების თავაკს, რაც რაკეტის სიზუსტეს გაცილებით ზრდის ირანულ და სხვა მსგავს რაკეტებთან შედარებით.
მთავარი ტიპის თავაკი არის ოპტიკური დამიზნების თავაკი რომელიც რაკეტის თავში ყენდება

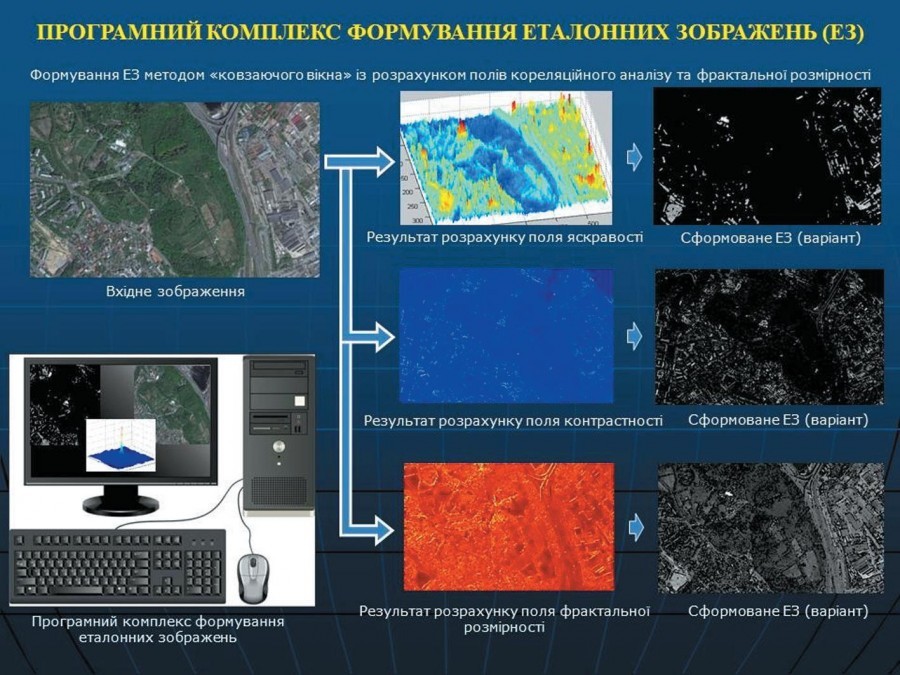
რაკეტის ბორტ–კომპიუტერში წინასწარ მოხდება სამიზნის
ეტალონური სურათის ჩატვირთვა
ანუ პირობითად კრემლის დაბომბვა უნდათ
რაკეტის კომპიუტერში კრემლის ფოტო ჩაიტვირთება ისე როგორც გამოიყურება თანამგზავრიდან
სამიზნესთან ახლოს როცა იქნება რაკეტა (სადაც ინერციული სისტემა გაიყვანს), ირთვება თვითდამიზნების თავაკი (დაახლოებით 10 კილომეტრის სიმაღლეზე) და იწყებს დედამიწის ზედაპირის სკანირებას ძალიან დიდი სიჩქარით
უღებს ფოტო სურათებს და ადარებს თავის ეტალონურ სურათს, ანუ ეძებს სამიზნეს
ამ ყველაფერს ბორტ–კომპიუტერი აკეთებს ძალიან სწრაფად
იმ შემთხვევაში თუ ეტალონური სურათის მსგავსი სამიზნე აღმოაჩინა, ხდება კურსის კორექტირება ისე რომ რაკეტა ზუსტად ამ სამიზნისკენ დაეშვას, აეროდინამიული რულების მეშვეობით რაკეტის კუდში
მსგავსი დონის რაკეტები ირანს არ გააჩნია და არც ექნება უახლოეს წლებში და უფრო პრიმიტიულ დამიზნებას იყენებენ

